Real-time Notification Service Leveraging Edge Computing
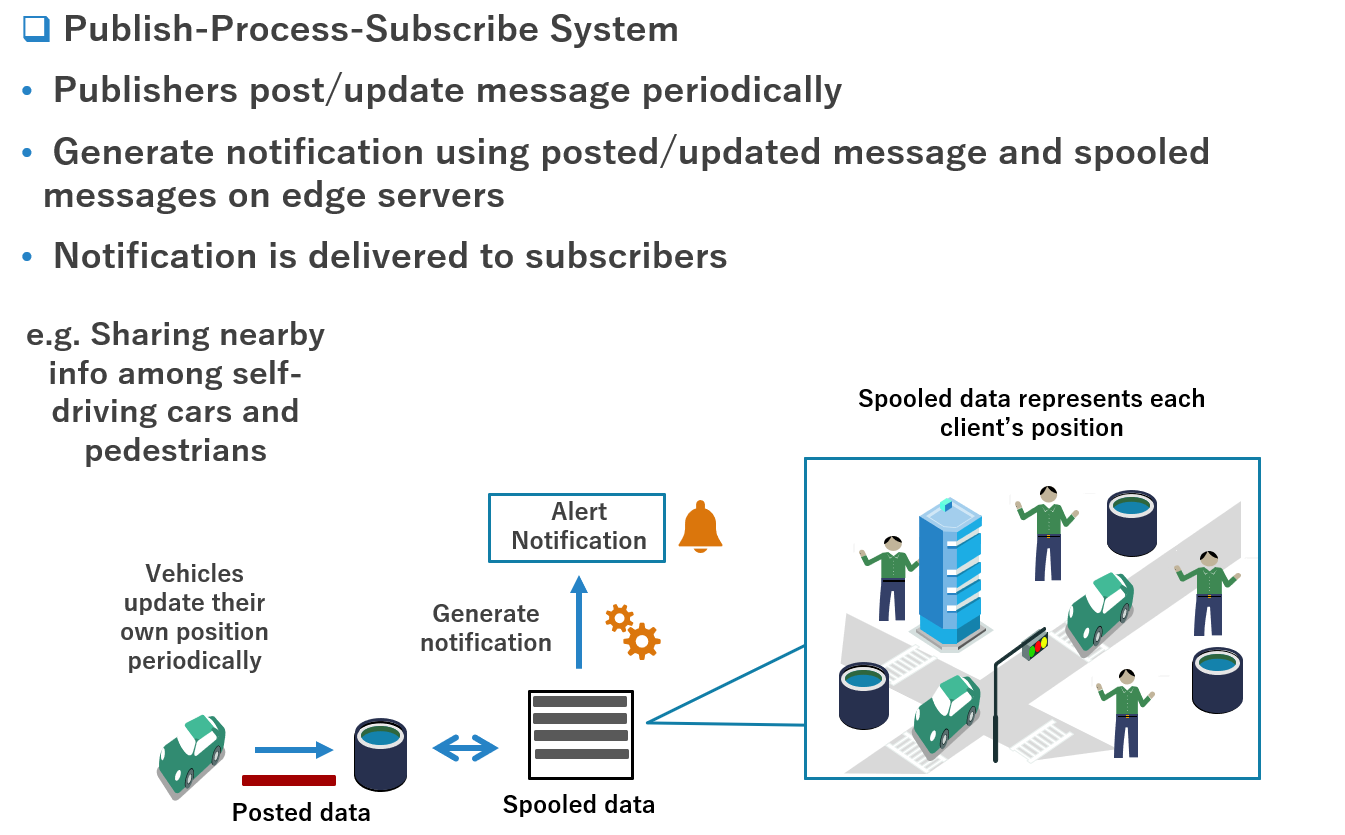
In this project, we try to achieve real-time communication leveraging edge computing technology. Today, more and more autonomous cars and robots have come to public. We have gained a lot of benefits from the autonomous entities these days, and certainly in the future. However, the capability of the self-driving cars and autonomous robots are restricted due to the risk of accidents. For example, the velocity of the autonomous cars must not exceed a certain limit that could cause a collision with a pedestrian who suddenly appears in front of the car. For resolving these situations, we are implementing a real-time communication system that enables automobile cars to comprehend the traffic conditions: not only the objects that can be detected by sensors such as LiDARs and cameras, but also the objects hidden by buildings or some obstacles, which cannot be detected by the sensors. We hope that autonomous cars and robots can make full use of their capability with the help of our system.
Related Resources
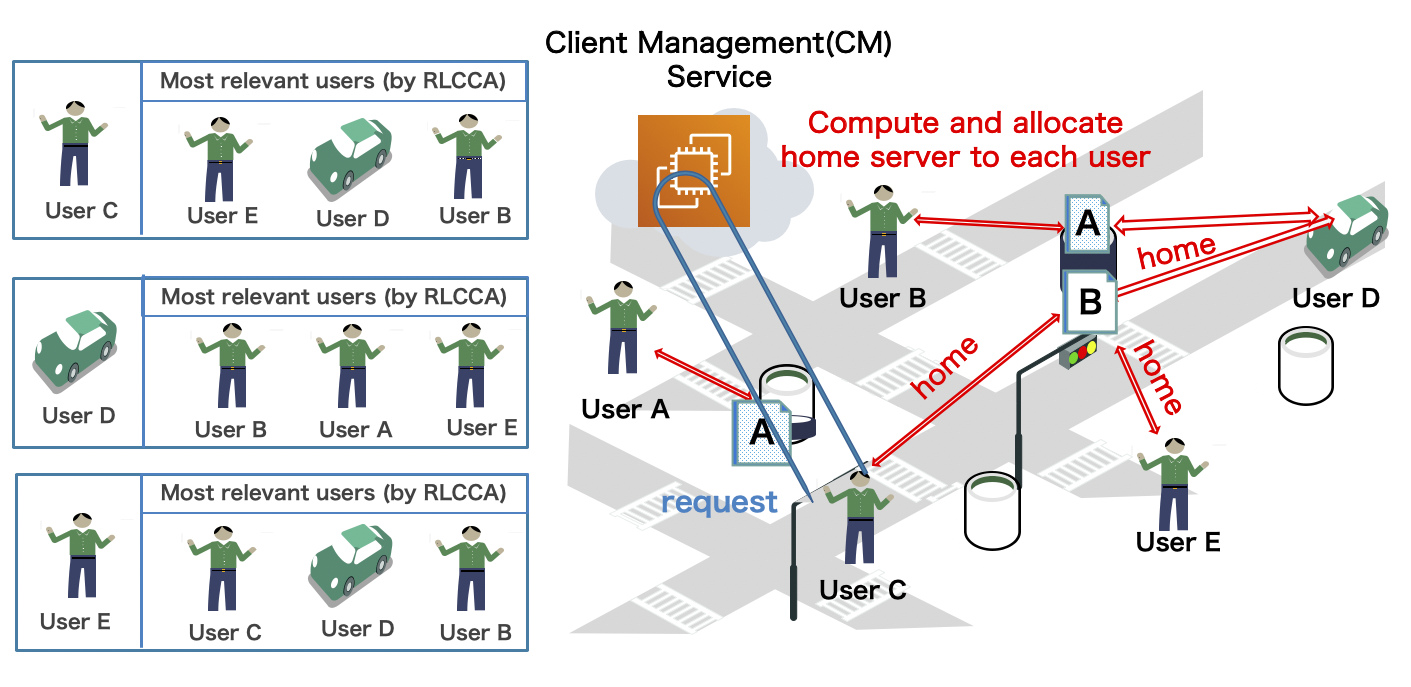
1. Collaborative Caching for Pub/Sub System in Edge Computing
Slides which was presented at IEICE General Conference, March 2020
2. RELOC (Git repository with README)
Data-analysis-enabled Notification Generation and Delivery System for Edge Computing
3. Topic allocation method on edge servers for latency-sensitive notification service
Tomoya Tanaka, Tomio Kamada, Chikara Ohta, “Topic allocation method on edge servers for latency-sensitive notification service,” International Journal of Network Management, 17 pages (e2173), June, 2021.